
浏览原职位详情




- 职位介绍
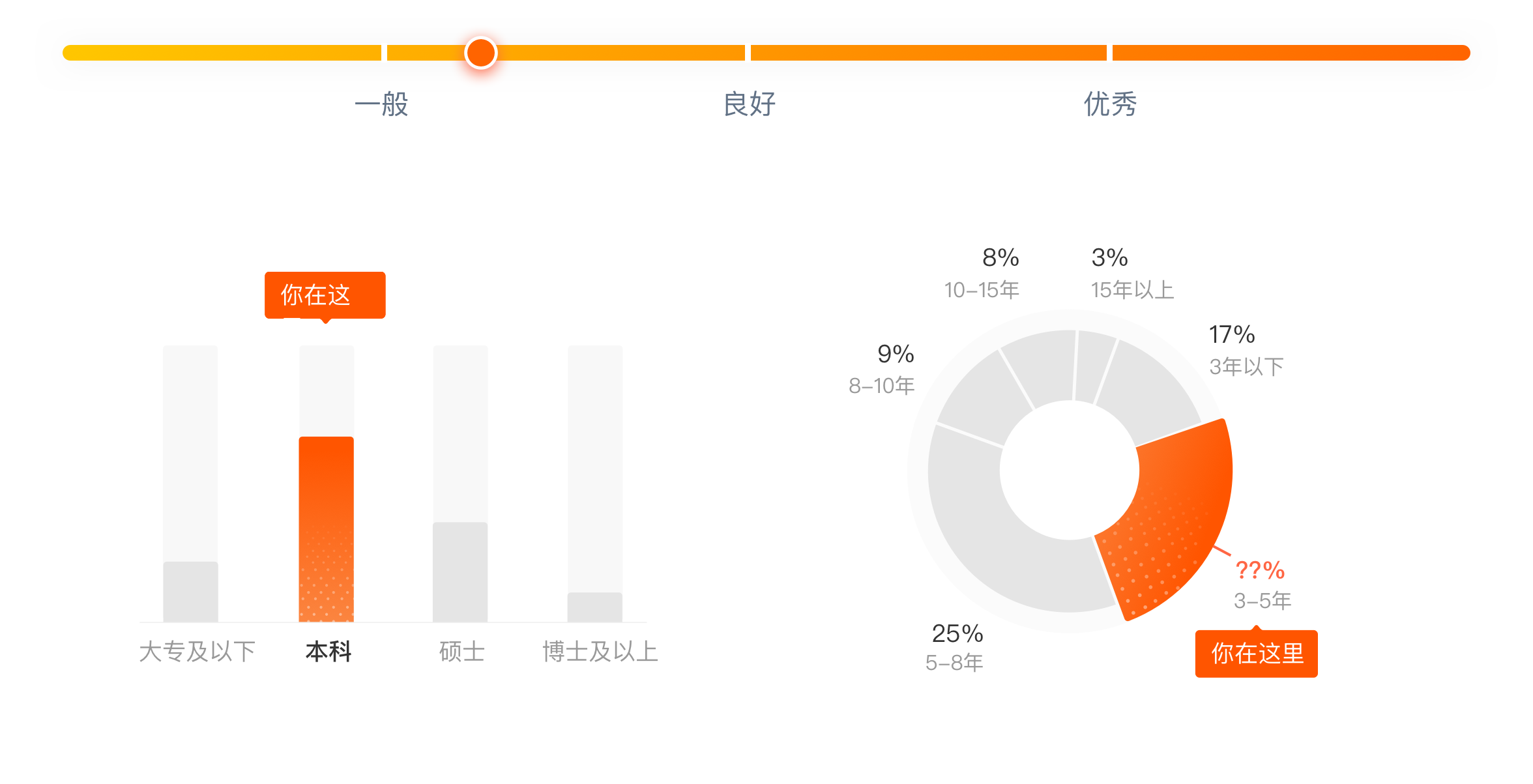
- 岗位职责: 负责机器人自主导航定位算法的研发,主要包括基于激光雷达、IMU、里程计等多传感器信息融合、路径规划和动态避障等; 负责机器人运动控制算法研发; 负责基于激光传感器的机器人建图、定位、导航、避障、路径规划、车体控制等算法的研发与产品应用; 负责机器人基于激光雷达、摄像头、毫米波雷达、IMU 等传感器的二/三维 SLAM 算法的应用; 负责 SLAM 导航系统的集成、调试、修改、测试和优化工作。 任职要求: 硕士及以上,自动化、计算机等相关专业,有机器人3年以上相关经验; 3-5年AGV机器人导航算法经验 熟悉 SLAM、导航、路径规划、控制及目标识别技术; 熟练掌握基于激光雷达等相关定位导航算法、能够基于激光或视觉进行二维/三维室内外环境重建,掌握多传感信息的融合; 熟练掌握移动机器人自主避障、自主路径规划以及运动规划算法; 熟悉 GPS 卫星定位原理,具有融合 GPS、IMU 及里程计等多种设备的定位算法研发经验,掌握多传感器数据融合、姿态解算及惯性导航; 精通c/c++等编程语言,熟悉Linux开发环境,如shell、GCC、make等工具; 进行过相关运动控制器、驱动器或嵌入式系统开发经验者优先。
猎聘温馨提示:
- 1. 如您发现平台内招聘方存在以下违规行为的,请立即举报
-
- a. 扣押您的身份证件或者其他证件;
- b. 要求您提供担保人、担保金或者以其他名义向您收取财物( 如培训费、体检费、资料费、置装费、押金等);
- c. 强迫您入股或者向您集资;
- d. 以招聘名义牟取不正当利益;
- e. 发布虚假招聘广告信息;
- f. 存在其他损害您的合法权益的行为。
- 2. 如您应聘的岗位属于涉外劳务合作/海外岗位的,请务必核实招聘方对外劳务合作资质取得情况,同时注意自身资金安全,防范招聘欺诈。
- 了解更多安全防范知识>
猜你喜欢















于女士
人事行政经理


郑先生
Application Engineer













董先生
算法工程师



1
2
3